CarDYNA新能源车辆仿真模型
1.1 模型概述
CarDYNA基于多体动力学的凯恩方法,借助于Matlab/Simulink平台模型开发,可用于传统车辆以及新能源车辆相关控制系统的开发,在模型在环(MIL)阶段辅助客户完成控制策略的快速验证;在硬件在环(HIL)阶段用于控制器功能测试。CarDYNA仿真模型分为两大部分:开放架构式的仿真模型、部件分类化的参数化文件;方便模型与参数的管理。CarDYNA模型根据不同的需求,可配置为专用于新能源汽车的纯电动/混合动力整车模型;专用于传统燃油发动机的发动机动力学仿真模型(柴油机满足国六排放系统要求)、用于底盘相关的复杂车辆动力学仿真模型等。
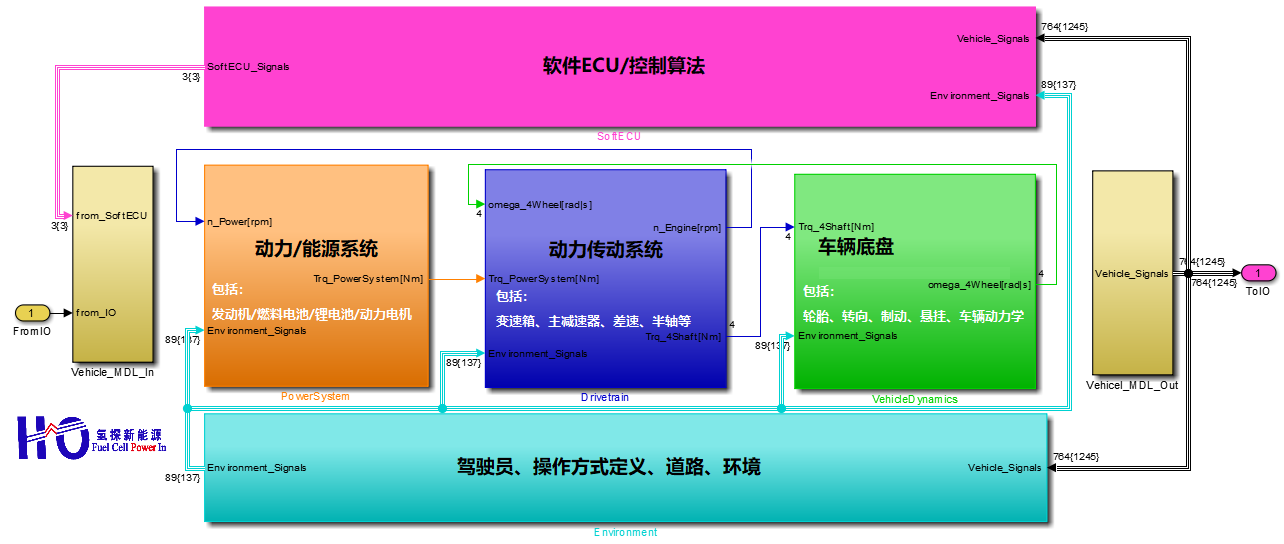
CarDYNA车辆动力学模型针对新能源整车(纯电、混合动力、燃料电池)仿真模型架构清晰,可实现对VCU、FCU、BMS、MCU的开发和测试,提供完整的模块。同hi考虑该项目中的具体需求,定制了某些模块。总体而言,实时仿真车辆模型包含:软件控制单元模型、动力与能源系统模型、传动系统模型、底盘系统模型、道路\驾驶员\操纵工况模型、IO模型。
仿真模型特点: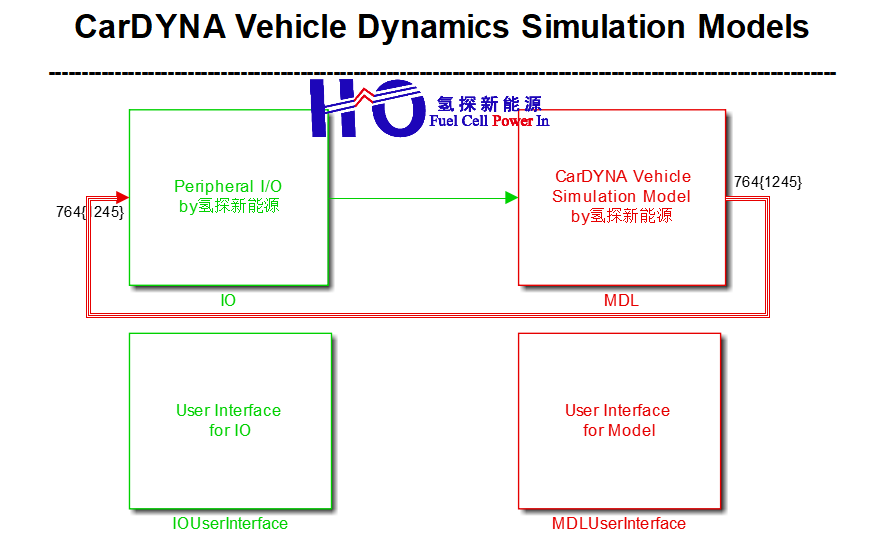
ü 基于M/S搭建
n 模块化、可拓展的模型构架
n 提供原模型与第三方模块接口
ü 建模本身
n 经典车辆动力学
n 参数与模型独立
n 半物理非线性模型
n 参数研究和优化
ü 横向动力学(操纵稳定性)
ü 纵向动力学(动力性, 制动性)
ü 新能源车辆控制器开发和测试
n 适用于电动汽车、混合动力
n 可用于HCU、扭矩控制、能源管理等
ü 实时性
n 针对主要的实时硬件平台通过RTW进行代码生成。仿真步长1ms
n 可支持基于M/S的所有主流仿真机
ü 参数化模型
n 大量的模型数据在车辆数据库中统一管理。
n 模型数据与车辆模型分开,方便配置
n 支持实时的参数调整和在线标定
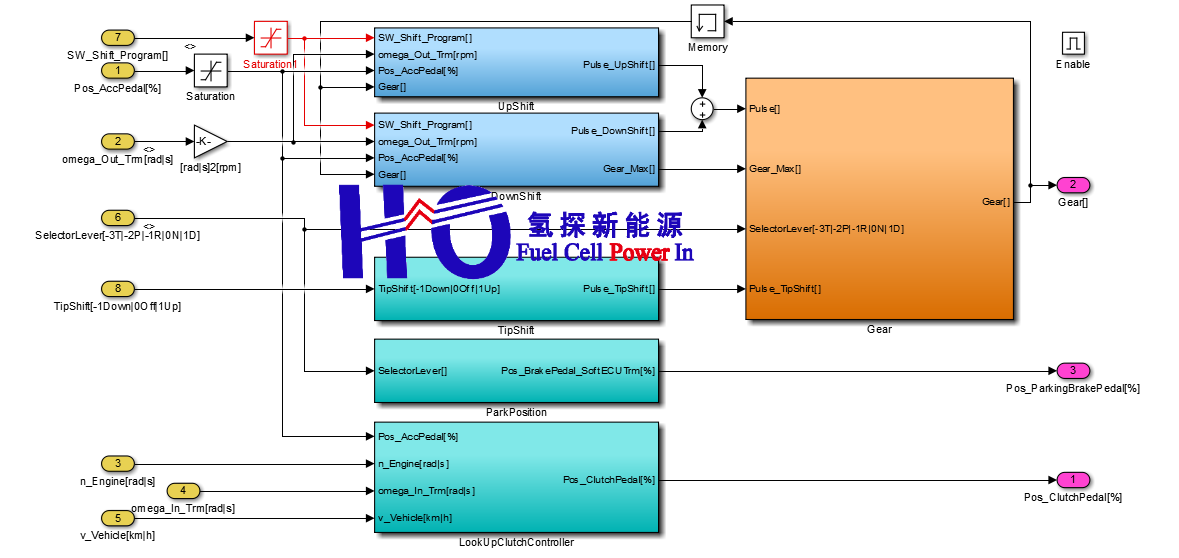
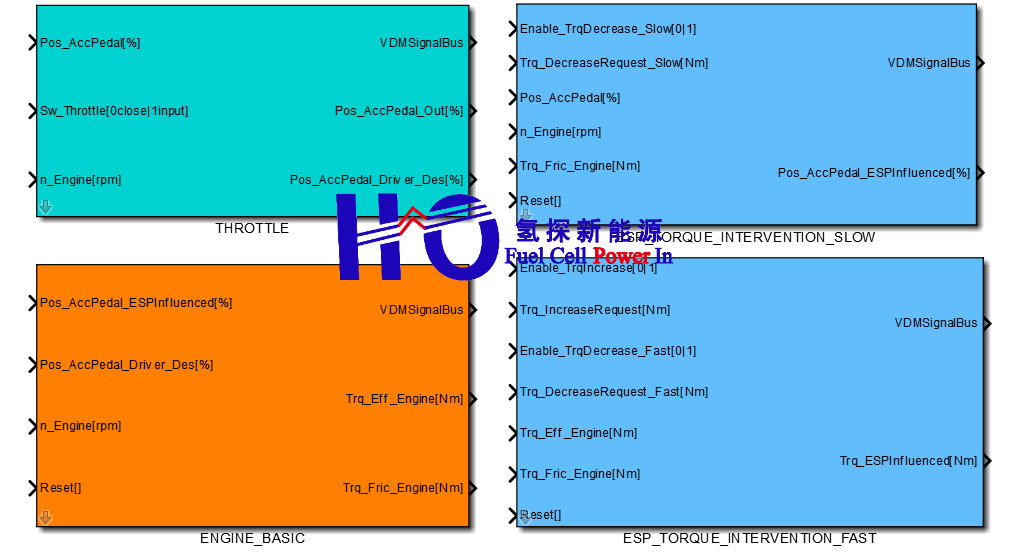
1) 软件ECU/控制算法模型
该部分模型可用于客户的控制算法集成,所有的软件控制器将独立成一个模块,如软件电机控制单元(MCU)软件发动机控制单元(ECU)、软件燃料电池控制单元(FCU)\软件换挡系统控制单元(TCU)、软件传动控制单元(XWD)、车姿悬挂控制单元(AAS)、软件联合制动控制单元(ESP\ABS)、软件动力辅助控制单元等。
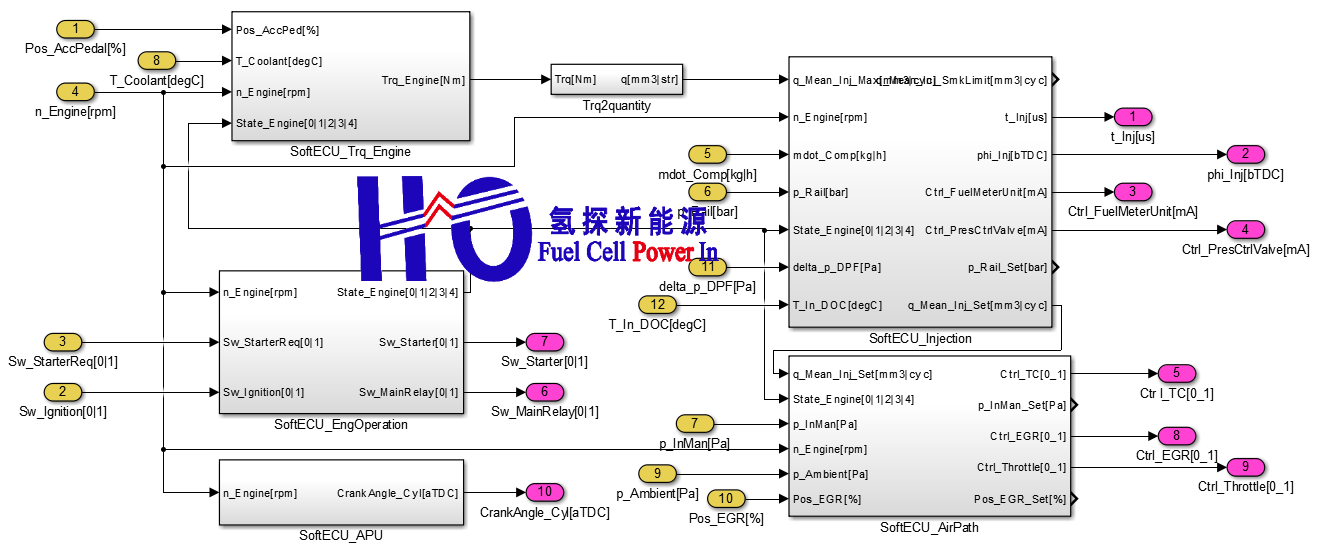
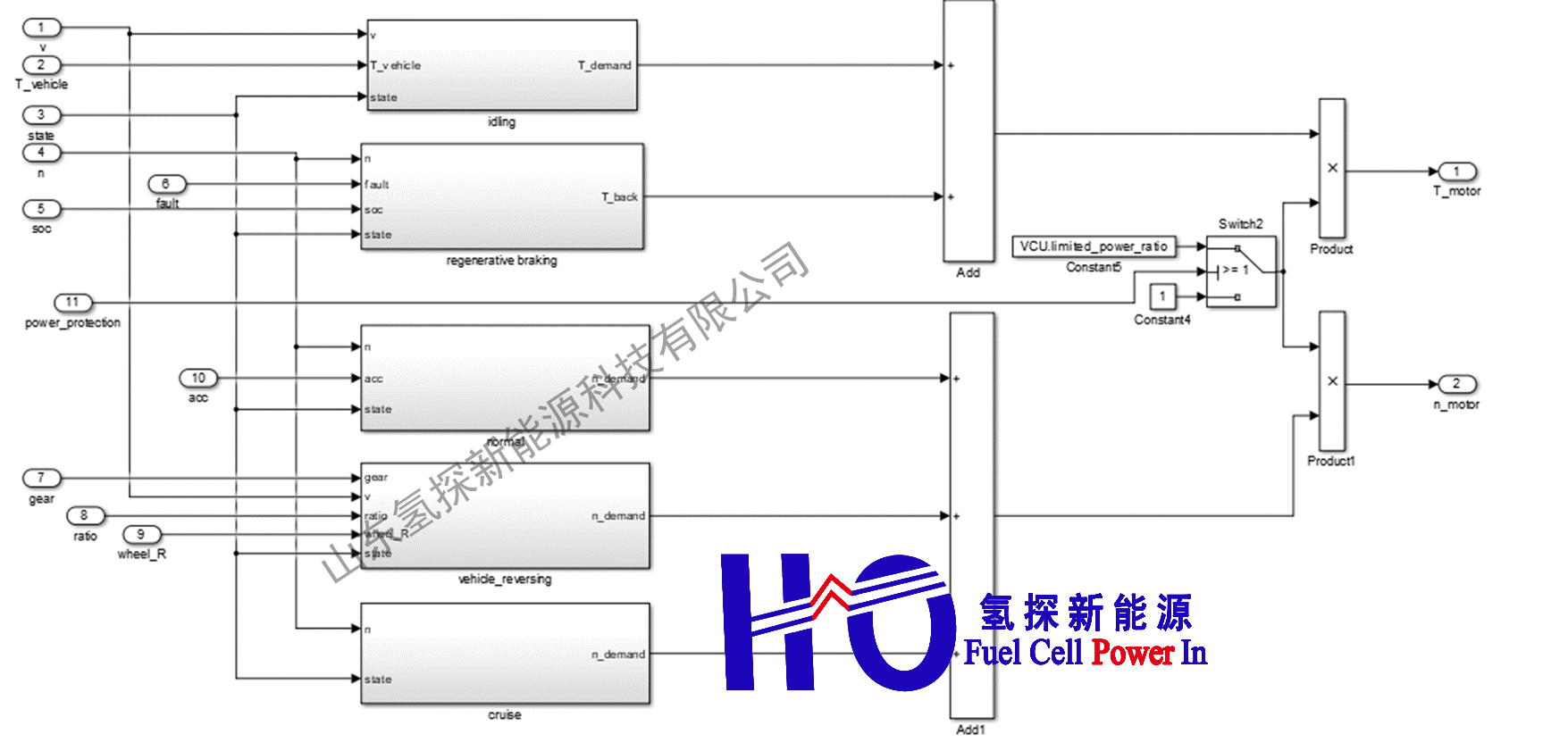
TCU模型 EMS模型 VCU模型
2) 动力/能源系统模型
动力/能源系统模型,根据客户要求,配置成为传统柴油发动机模型;传统汽油发动机模型(该部分如需详细的发动机动力学模型,可单独提供);用于纯电动汽车仿真的锂电池模型和动力电机模型;用于全功率燃料电池仿真模型;可配置混合动力能源系统等。
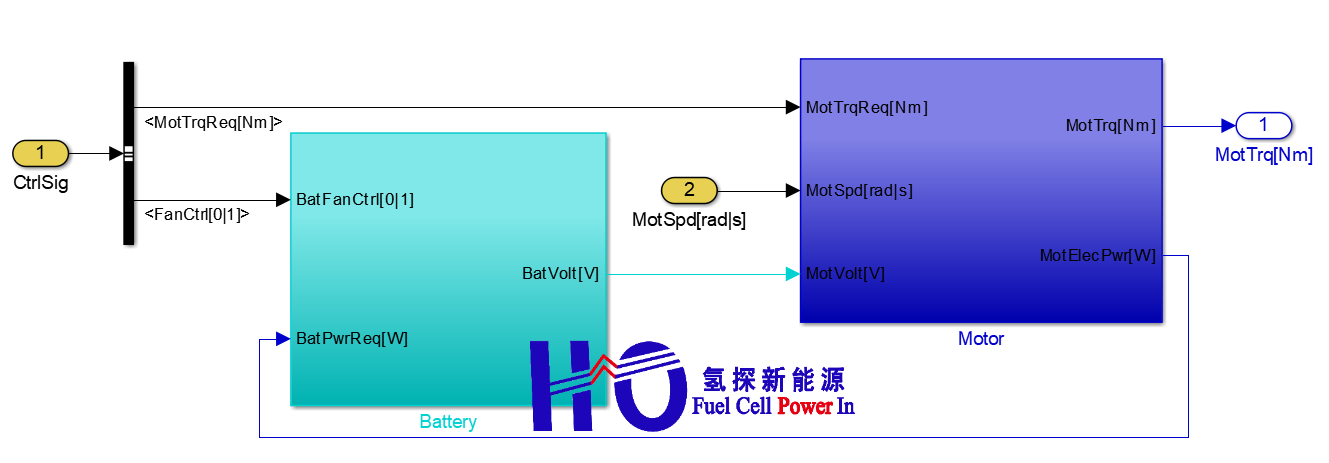
基础发动机模型 电机+动力电池模型
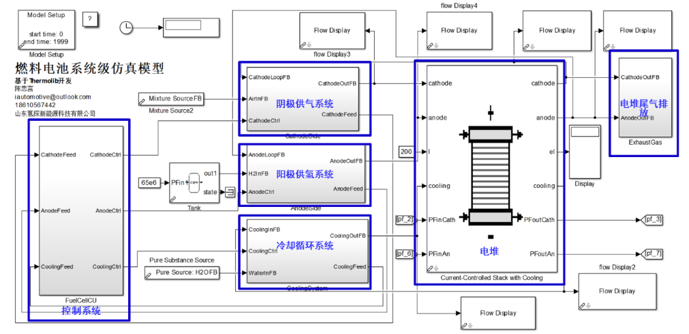
燃料电池仿真模型
3) 动力传动系统模型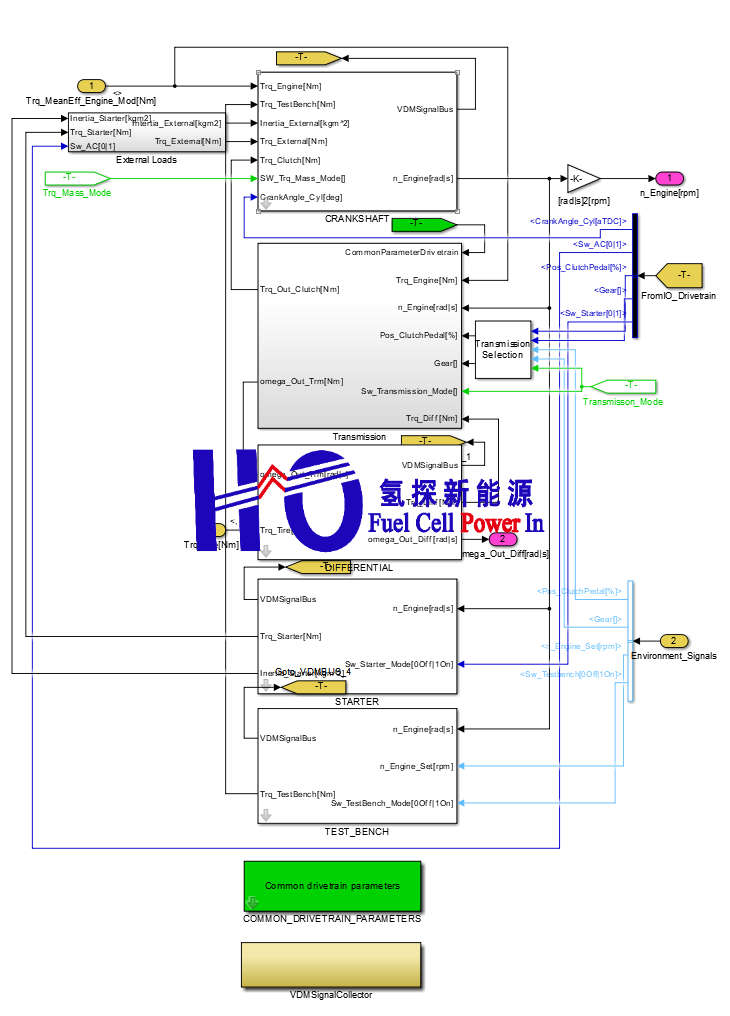

动力传动系统用于实现动力输出,可根据用户需求,配置用于燃油发动机的起动机模型、惯性飞轮模型;变速箱模型可选择手动、自动变速箱模型、用于新能源汽车的多档变速箱模型;中央差速器模型;车轴模型、前后差速器模型、四个半轴模型等。
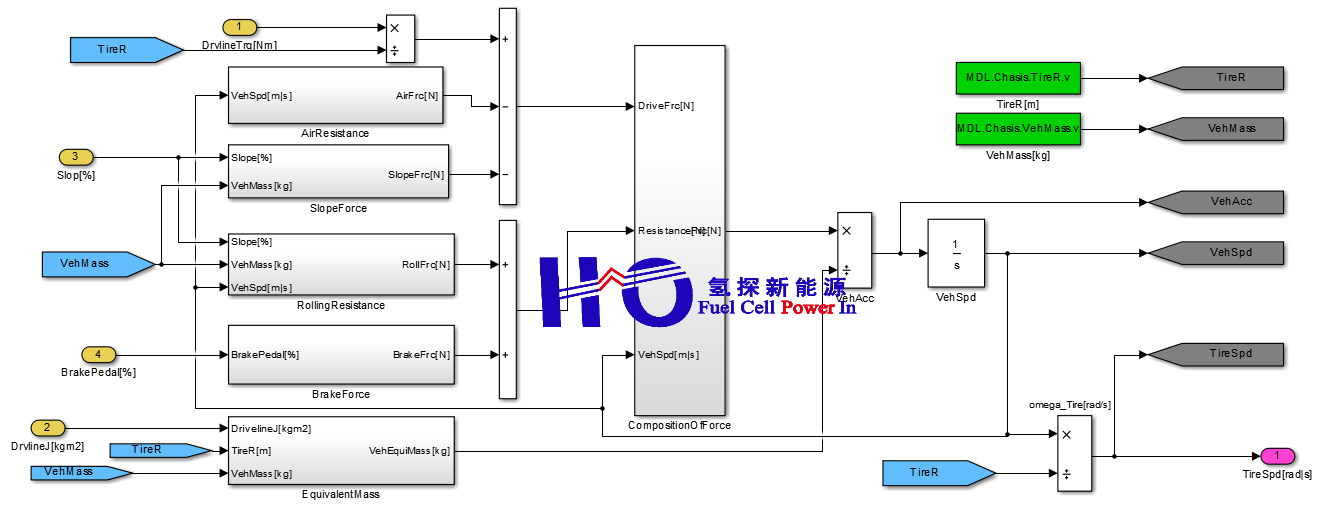
4) 车辆底盘模型
用于新能源车辆仿真的动力学模型考虑基础的纵向动力学仿真。整车动力学模型用于描述车辆的运行,计算车辆的纵向运动参数,模型考虑轮胎驱动力、空气动力学、坡道阻力、滚动阻力、制动力、整车质量分布等受力,进而计算车体纵向受力情况,通过积分可计算车辆的纵向运动参数。整车动力学采用理论公式和实验数据综合的方式来建模,在仿真的精度和仿真的实时性之间取得平衡。
基础动力学模型
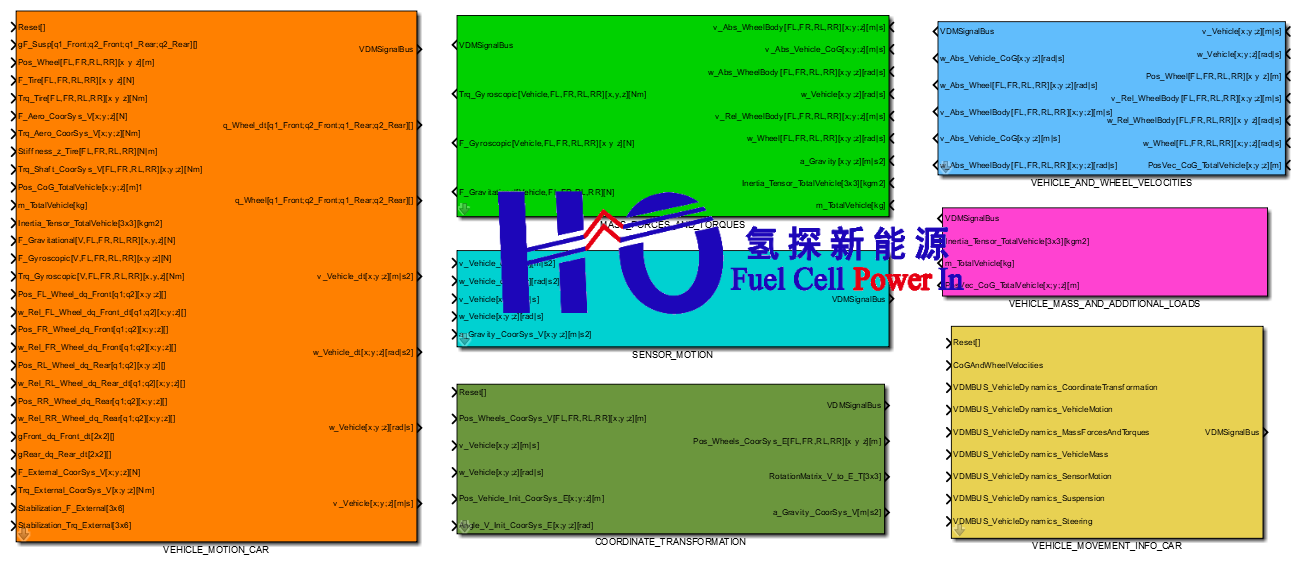
复杂车辆动力学模型
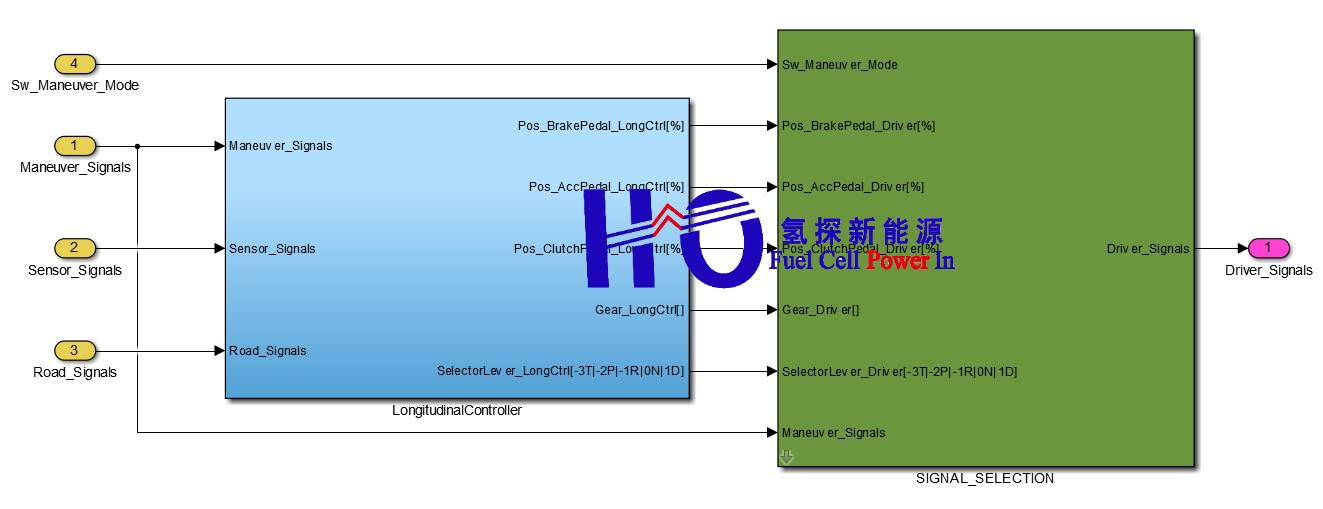
5) 环境与操纵模型
道路、驾驶员、操纵工况模型用于给车辆的运动提供环境。道路模型可以设置路面摩擦、路面线型、路面坡度等。驾驶员模型用于闭环运行测试工况,如跟踪特定的车速曲线、跟踪特定的轨迹曲线等。操纵工况模型用于预设测试工况。
6) IO模型
IO模型主要负责传感器的信号模拟、执行器的信号采集、特殊信号软处理等。基于Matlab/Simulink开发,具有以下几个主要功能:
1) 程控电源控制:程控电源开关控制、电压控制、最大电流限制等。
2) 系统供电:控制开关电源输出,模拟车辆上电过程的系统供电,实现系统的同时供电。
3) 传感器信号模拟:将物理量信号(如转速)转化为电信号(PWM波的频率)输出到硬件系统,具有手动控制功能

4)执行器信号采集:采集各控制器发出的执行器信号(如喷油时间),用于车辆模型的计算。
5) CAN节点模拟:模拟各虚拟控制器的CAN信号发送。
6) CAN信号接收:接收、显示真实控制器发出的CAN信号。
7) 特殊执行机构控制模块(如负载电机控制等)
 手机:18610567442(陈先生)座机:0531-88289902
手机:18610567442(陈先生)座机:0531-88289902
 邮箱: support@fuelcellin.com
邮箱: support@fuelcellin.com
 地址: 山东省济南市历下区齐鲁文化创意基地17号楼
地址: 山东省济南市历下区齐鲁文化创意基地17号楼
Copyright © 2026 山东氢探新能源科技有限公司Fuel Cell Power In 版权所有 ICP证:鲁ICP备18036378号